Các kỹ năng robot được điều kiện hóa bởi ngôn ngữ (language-conditioned robotic skills) cho phép khai thác khả năng suy luận cấp cao của các Mô hình Ngôn ngữ Lớn (Large Language Models – LLMs) để điều khiển robot ở mức thấp. Một thách thức còn tồn tại là làm thế nào để thu nhận được một tập hợp đa dạng các kỹ năng nền tảng. Các phương pháp hiện nay либо phân rã thủ công một nhiệm vụ phức tạp thành các hành động robot cơ bản theo cách tiếp cận từ trên xuống (top-down), либо khởi tạo càng nhiều tổ hợp hành động càng tốt theo cách tiếp cận từ dưới lên (bottom-up) nhằm bao phủ nhiều khả năng nhiệm vụ hơn. Tuy nhiên, các cách phân rã hoặc tổ hợp này đều đòi hỏi phải có một thư viện kỹ năng ban đầu. Ví dụ, khả năng “nắm bắt” (grasping) sẽ không bao giờ xuất hiện nếu thư viện kỹ năng chỉ bao gồm các kỹ năng “đẩy” (pushing) đa dạng.
Các kỹ thuật khám phá kỹ năng hiện có dựa trên học tăng cường (reinforcement learning) thường thu nhận kỹ năng thông qua việc thăm dò toàn diện, nhưng kết quả thu được thường là các hành vi thiếu ý nghĩa. Trong nghiên cứu này, chúng tôi giới thiệu một khung học tập mới cho việc tự động khám phá kỹ năng của robot, hoàn toàn được dẫn dắt bởi LLMs. Khung này bắt đầu bằng việc LLM sinh ra các đề xuất nhiệm vụ dựa trên mô tả cảnh quan và cấu hình của robot, với mục tiêu dần dần thu nhận các kỹ năng mới khi mỗi nhiệm vụ được hoàn thành.
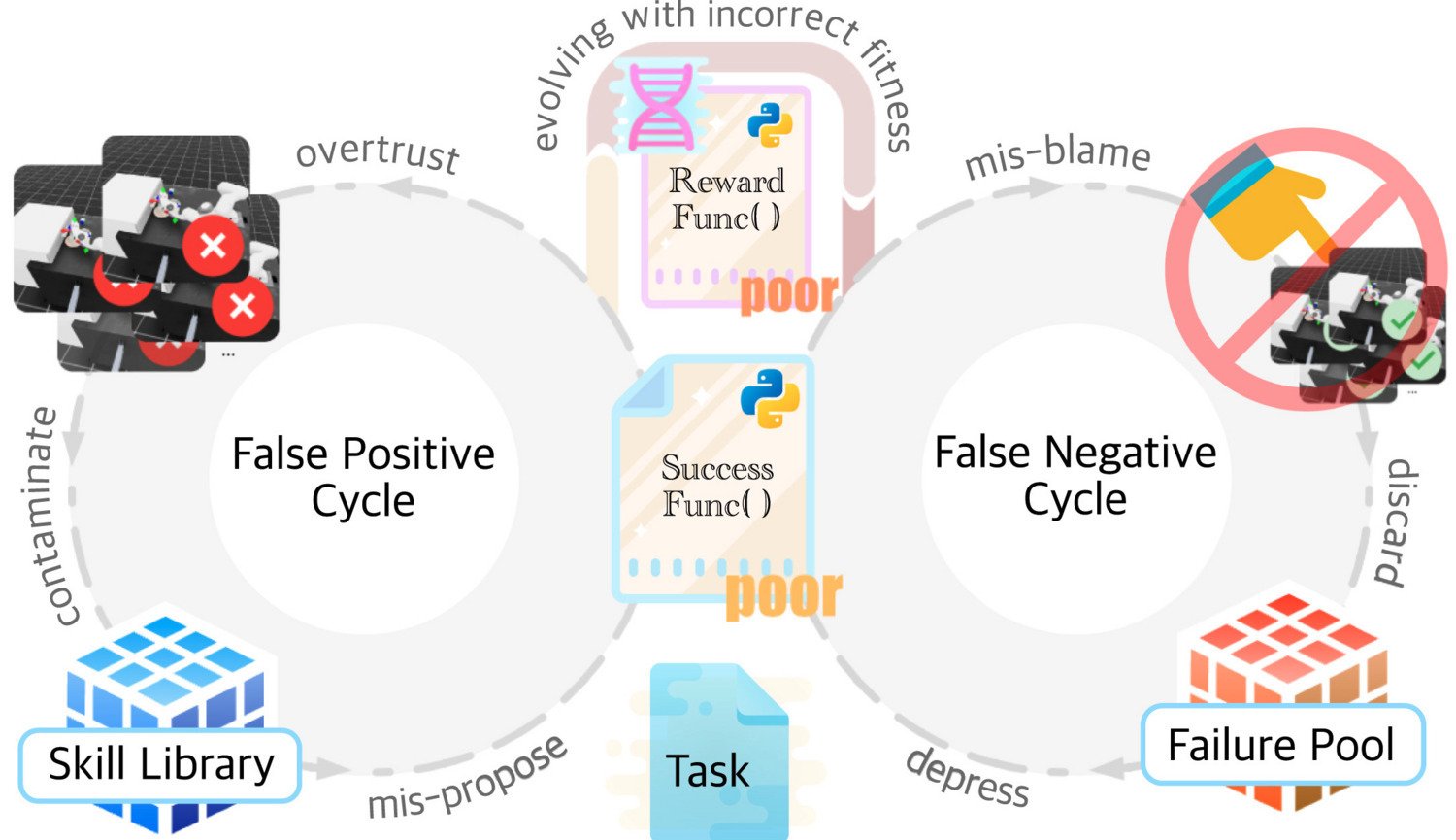
Đối với mỗi nhiệm vụ được đề xuất, một chuỗi các quá trình học tăng cường được khởi tạo, trong đó các hàm phần thưởng và tiêu chí xác định thành công được LLM lấy mẫu để phát triển chính sách điều khiển tương ứng. Độ tin cậy và tính đáng tin của các hành vi đã học được đảm bảo thông qua một mô hình thị giác–ngôn ngữ độc lập. Kết quả cho thấy, bắt đầu từ trạng thái không có bất kỳ kỹ năng nào, thư viện kỹ năng dần hình thành và mở rộng thành những kỹ năng ngày càng có ý nghĩa và đáng tin cậy, cho phép robot tiếp tục đề xuất và hoàn thành các nhiệm vụ nâng cao một cách hiệu quả.
Thông tin bài nghiên cứu
Zhao, X., Weber, C., Wermter, S. (2026). Agentic Skill Discovery.
Robotics and Autonomous Systems, Tập 196, 105248.
DOI: 10.1016/j.robot.2025.105248
👉 Toàn văn bài nghiên cứu:
https://www.researchgate.net/publication/397899113_Agentic_skill_discovery